实例分割:从算法原理到面试实战指南
2025年Java面试宝典最新版,点击领取:
https://pan.baidu.com/s/1RUVf75gmDVsg8MQp4yRChg?pwd=9b3g
(提取码:9b3g)
什么是实例分割?
实例分割是计算机视觉中的核心任务,它不仅要识别图像中的物体类别(比如“人”或“车”),还要区分同一类别的不同个体。例如,一张街景中有5辆汽车,算法需要标出每辆车的精确轮廓并分配独立ID。
(图:实例分割在自动驾驶中的应用)
实例分割的三大技术原理
- 两阶段算法:以Mask R-CNN为代表,先提取候选区域,再对每个区域进行分类和掩码预测,精度高但速度较慢。
- 单阶段算法:如YOLACT,通过并行生成掩码和边界框,牺牲少量精度换取实时性,适合视频处理场景。
- Transformer架构:DETR等模型用自注意力机制替代传统Anchor,避免了NMS后处理,正在成为研究热点。
面试高频考点解析
1. Mask R-CNN的ROI Align解决了什么问题?
传统ROI Pooling在特征图量化时会出现两次取整误差,导致小物体定位不准。ROI Align改用双线性插值保留小数坐标,提升像素级任务的精度。
2. 如何处理实例之间的遮挡问题?
可结合时序信息(如视频中的运动轨迹)或引入3D空间推理(如深度估计)。例如自动驾驶场景中,通过多帧数据预测被遮挡车辆的位置。
(图:遮挡场景下的实例分割)
实战技巧:避坑指南
- 数据标注陷阱:边缘模糊的物体(如云朵、火焰)需要设置标注规则,避免团队标注标准不一致
- 模型部署优化:使用TensorRT对模型进行INT8量化,可在保持90%精度的前提下提速3倍
- 小样本学习:采用Copy-Paste数据增强,将目标物体随机复制到不同背景中
面试加分项:前沿技术
- 零样本实例分割:通过CLIP等跨模态模型,无需训练即可分割未见过类别
- 3D实例分割:结合NeRF技术,从2D图像重建三维物体实例
需要购买面试鸭会员的同学,可通过面试鸭返利网联系我,返现25元。平台整理了各大厂最新面试题库,包含大量实例分割相关真题解析。
总结
掌握实例分割不仅要理解算法原理,更要关注工程落地中的实际问题。建议结合面试鸭返利网的题库进行针对性训练,尤其注意模型优化、多模态融合等新兴考点。
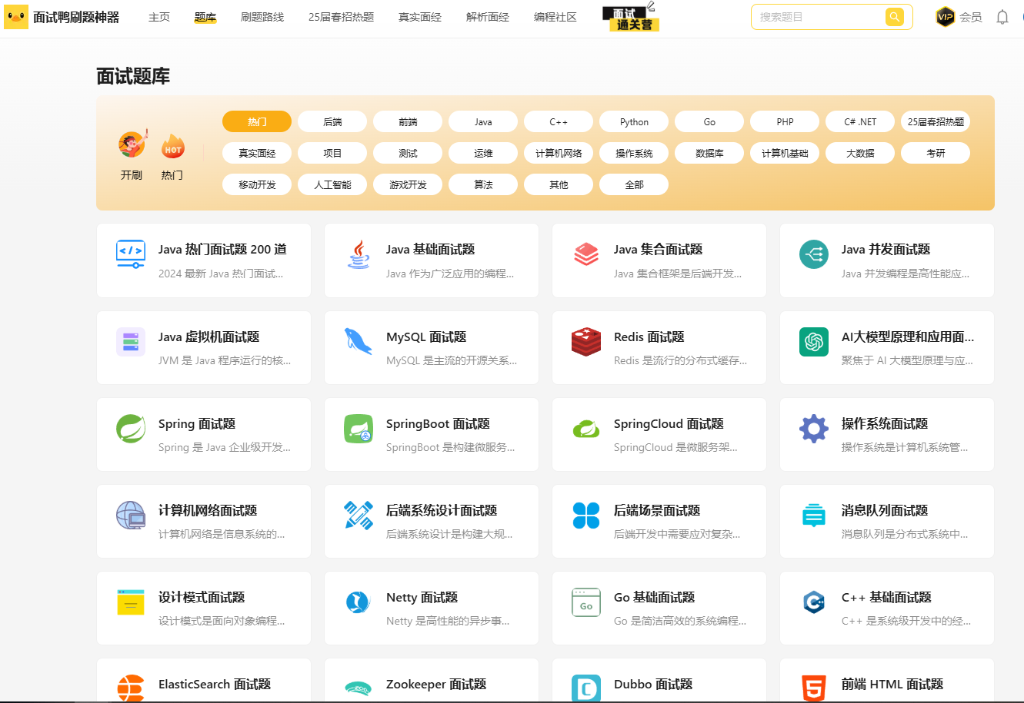
(图:面试鸭返利网真题分类页面)

